220/330 - Project Overview
Sit back, relax and let the robot do the work. At the same time the grass becomes thick and lush due to the constant mowing. No more grass cuttings - sounds to good to be true..... and by the way you built it yourself...... A great talking point with friends as the mower travels past doing the work 😊

Fully autonomous robot lawn mower (now with Smartphone APP). The mower project includes the mower itself a boundary wire control station, smartphone APP and an optional charging station. The mower navigates within the boundary wire which is positioned (pinned) around the perimeter of the garden. Once the mower senses the perimeter wire, it stops reverses and moves off in a new direction. The mower also has 3 sonar sensors to detect objects in the mowers path. Once the mowers battery is exhausted, the mower uses the boundary wire to navigate itself back to the charging station. All this can be customised in the Arduino software or completely re-written to your personal preferences.
All these features can also be controlled via Smartphone and WiFi.
Commercial mowers with this specification cost upwards of 600€ ($680).
Online Articles writing about this project:
3DPrint.com hackstaer.io 3d-grenzenlos.de blogdot.tv
3dtoday.ru Arduino Blog hackster.io(2) 3ddruck.com
Build Difficulty: 7/10
Skills Required: 3D Printing, Arduino, Soldering electrical components
Equipment Required: 3D Printer (or print service), PLA Material, Soldering Iron, Multimeter, Computer/Laptop with Arduino Software (free), Various screwdrivers and Allen wrenches (M3), Wire strippers.

Mower 330 Version
330 Mower coverage 400-800m²
Cut Width: 220mm
Printer Required: 330x330x350mm 3D Printer
330 Lawn Mower STL's: Click here for STL files or here for GITHUB *FREE*
Mower 220 Version
220 Mower coverage 300-500m² (mower is smaller than the 330)
Cut Width : 180mm
Printer Required: 220x220x200mm 3D Printer
220 Lawn Mower STL's: STL's can be purchased here220 Charging Station: Included in the Mower 220 STL Pack
220 Bumper Upgrade: Available Here
220 Sliding Cover Upgrade: Available Here
220 CAD Data: Available here
Perimeter Transmitter Housing for 220 and 330 Mower:
Click here for STL files *FREE FILES*
Arduino Code for 220 and 330 Mower:
The complete software for the Mower is running on Arduino. This is open source and can be modified by anyone. The software to run the mowers is free of charge and available on my Github site.
Need The 3D Parts Printed for You? :
Dont have a 3D printer or your print bed is too smal : The parts can be ordered here in my shop
ReP_AL Lawn Mower Dimensions
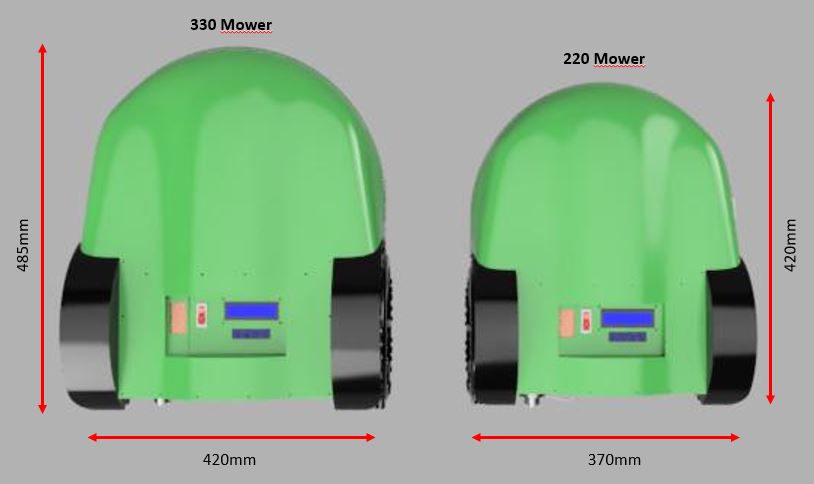

The build and circuit wiring of the project is explained in the following pages. The wiring for the 220 and the 330 Mower is identical.
The original electrical components can be bought here in this shop individualy or as a package. Using the original electrical components makes the build process easier and ensures smooth communication with the software:
I have also uploaded some test sketches in Github so you can test individual components and make sure they are working. This simplifies the debug process enormously.
I am available with any questions about the build:

Which Mower To Build?
Here is a quick overview of the main specifications to select a mower
