PIXHAWK Introduction
PIXHAWK & Mission Planner Robot Control
PIXHAWK and Mission Planner provides a ready to go GPS solution for controlling robots and carrying out GPS missions. This control system can be integrated into the robot mower to perform "mowing missions" without the need for a large boundary wire fence.
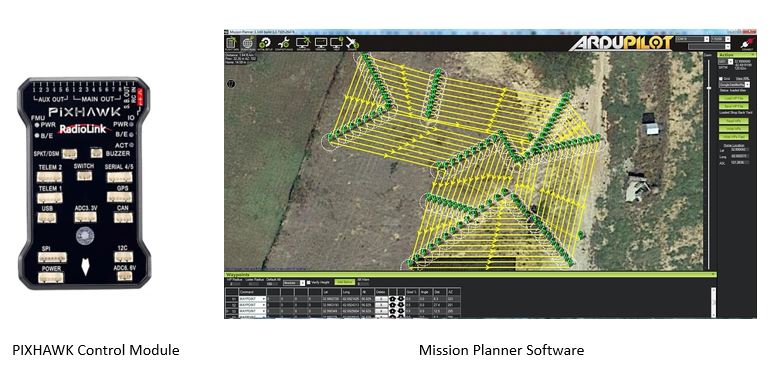
The PIXHAWK Module in combination with a GPS Compass delivers the position of the robot and with the mission planner software "missions" can be created to cover a certain area of terrain.
The mission planner software is a very powerful windows/apple based software tool which is used to define GPS waypoints and missions which can be saved into the PIXHAWK module. Once the mission is activated the PIXHAWK will take control of the robot/mower and guide it through this GPS mission.
Arduino PIXHAWK Communication
Using the MAVLINK library, the Aduino control board can communicate with the PIXHAWK via serial communication. The arduino can activate the PIXHAWK and start / stop missions loaded onto the PIXHAWK module.
The mower can then give steering control to the PIXHAWK module allowing the mower to be guided through the GPS mission.
A typical Mower / GPS Mission could look like this:

GPS Accuracy
The accuracy of the GPS positioning depends on the accuracy of the GPS information the PIXHAWK receives. A standard GPS compass (Neo M8N) provides a position accuracy of 3-4m.
An RTK GPS system can provide an accurcay of a few cm.
Depending on the accuracy need of your project the correct GPS module should be used.